

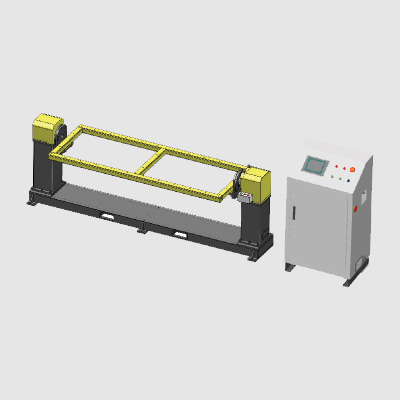








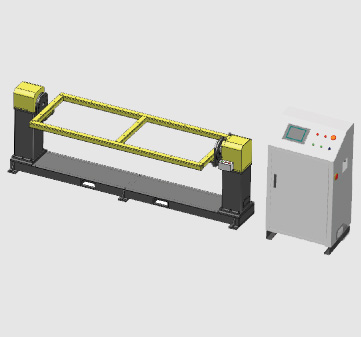
| 额定转速(rpm) | 15 |
| 最大转速(rpm) | 20 |
| 负载(kg) | 300 |
| 工装框架(mm) | 长≤2200宽≤800 |
| 自动翻转角度 | ±360° |
| 翻转重复定位精度(mm) | ±0.05(半径500mm处) |

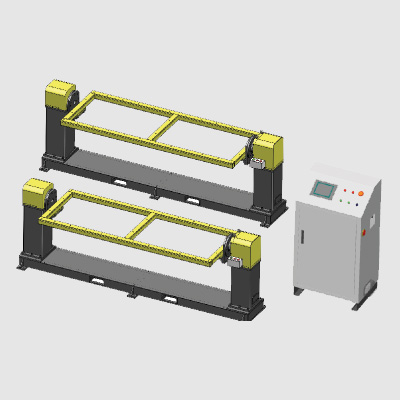
| Ⅱ、Ⅲ轴减速机 | RV-40E-121 |
| Ⅱ、Ⅲ轴回转半径(mm) | 500 |
| Ⅱ、Ⅲ轴最大转速(rpm) | 20 |
| 单边负载(Kg) | 300 |
| 各轴翻转角度 | ±360° |
| 翻转重复定位精度(mm) | ±0.09(半径500mm处) |

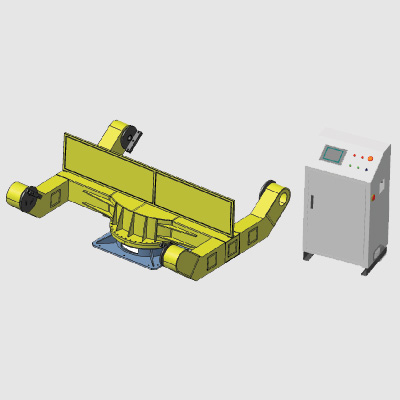
| Ⅱ、Ⅲ轴减速机 | RV-40E-121 |
| Ⅱ、Ⅲ轴回转半径(mm) | 500 |
| Ⅱ、Ⅲ轴最大转速(rpm) | 20 |
| 单边负载(Kg) | 300 |
| 各轴翻转角度 | ±360° |
| 翻转重复定位精度(mm) | ±0.09(半径500mm处) |
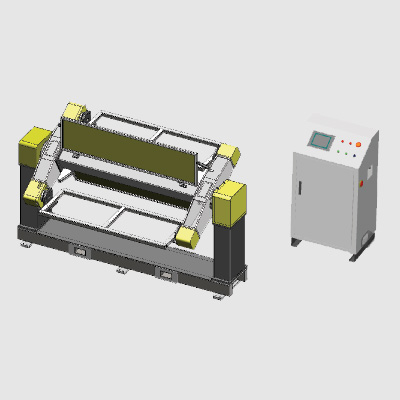
| 额定转速(rpm) | 15 |
| 最大转速(rpm) | 20 |
| 负载(kg) | 300 |
| 工装框架(mm) | 长≤2200宽≤800 |
| 自动翻转角度 | ±360° |
| 翻转重复定位精度(mm) | ±0.05(半径500mm处) |
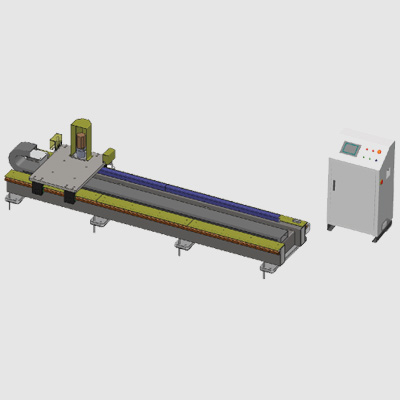
| 最高速度(m/s) | 1 |
| 额定速度(m/s) | 0.6 |
| 加速时间(s) | 0.4-1 |
| 最大转速(rpm) | 20 |
| 负载(Kg) | 1000 |
| 底座宽度(mm) | 720 |

